“Solar sail” wrinkling#
Wrinkling of a membrane subjected to a pressure and a temperature change
This is a 3D simulation
Units#
Length: mm
Mass: kg
Time: s
Mass density: kg/mm^3
Force: milliN
Stress: kPa
Energy: microJ
Temperature: K
Boltzmann Constant: 1.38E-17 microJ/K
Number of polymer chains per unit vol: #/mm^3
Thermal expansion coefficient: #/K
Specific heat: microJ/(mm^3 K)
Thermal conductivity: microW/(mm K)
Software:#
Dolfinx v0.8.0
In the collection “Example Codes for Coupled Theories in Solid Mechanics,”
By Eric M. Stewart, Shawn A. Chester, and Lallit Anand.
Import modules#
# Import FEnicSx/dolfinx
import dolfinx
# For numerical arrays
import numpy as np
# For MPI-based parallelization
from mpi4py import MPI
comm = MPI.COMM_WORLD
rank = comm.Get_rank()
# PETSc solvers
from petsc4py import PETSc
# Specific functions from dolfinx modules
from dolfinx import fem, mesh, io, plot, log
from dolfinx.fem import (Constant, dirichletbc, Function, functionspace, Expression )
from dolfinx.fem.petsc import NonlinearProblem
from dolfinx.nls.petsc import NewtonSolver
from dolfinx.io import VTXWriter, XDMFFile
# Specific functions from ufl modules
import ufl
from ufl import (TestFunctions, TrialFunction, Identity, grad, det, div, dev, inv, tr, sqrt, conditional ,\
gt, dx, inner, derivative, dot, ln, split, exp, eq, cos, sin, acos, ge, le, outer, tanh,\
cosh, atan, atan2)
# basix finite elements (necessary for dolfinx v0.8.0)
import basix
from basix.ufl import element, mixed_element
# Matplotlib for plotting
import matplotlib.pyplot as plt
plt.close('all')
# For timing the code
from datetime import datetime
# Set level of detail for log messages (integer)
# Guide:
# CRITICAL = 50, // errors that may lead to data corruption
# ERROR = 40, // things that HAVE gone wrong
# WARNING = 30, // things that MAY go wrong later
# INFO = 20, // information of general interest (includes solver info)
# PROGRESS = 16, // what's happening (broadly)
# TRACE = 13, // what's happening (in detail)
# DBG = 10 // sundry
#
log.set_log_level(log.LogLevel.WARNING)
Define geometry#
# Create mesh
L0 = 100.0 # Length of plate, mm
T0 = 1.0 # Thickness of plate, mm
domain = mesh.create_box(MPI.COMM_WORLD, [[0.0, 0.0, 0.0], [L0, L0, T0]],\
[10, 10, 2], mesh.CellType.tetrahedron)
x = ufl.SpatialCoordinate(domain)
Identify the boundaries of the domain
# Identify the planar boundaries of the box mesh
def xBot(x):
return np.isclose(x[0], 0)
def xTop(x):
return np.isclose(x[0], L0)
def yBot(x):
return np.isclose(x[1], 0)
def yTop(x):
return np.isclose(x[1], L0)
def zBot(x):
return np.isclose(x[2], 0)
def zTop(x):
return np.isclose(x[2], T0)
# Identify the corners of the domain which will be fixed
def pin1(x):
return np.logical_and(np.isclose(x[0], 0), np.isclose(x[1], 0))
def pin2(x):
return np.logical_and(np.isclose(x[0], L0), np.isclose(x[1], L0))
# Mark the sub-domains
boundaries = [(1,xBot),(2,xTop),(3,yBot),(4,yTop),(5,zBot),(6,zTop)]
# build collections of facets on each subdomain and mark them appropriately.
facet_indices, facet_markers = [], [] # initalize empty collections of indices and markers.
fdim = domain.topology.dim - 1 # geometric dimension of the facet (mesh dimension - 1)
for (marker, locator) in boundaries:
facets = mesh.locate_entities(domain, fdim, locator) # an array of all the facets in a
# given subdomain ("locator")
facet_indices.append(facets) # add these facets to the collection.
facet_markers.append(np.full_like(facets, marker)) # mark them with the appropriate index.
# Format the facet indices and markers as required for use in dolfinx.
facet_indices = np.hstack(facet_indices).astype(np.int32)
facet_markers = np.hstack(facet_markers).astype(np.int32)
sorted_facets = np.argsort(facet_indices)
#
# Add these marked facets as "mesh tags" for later use in BCs.
facet_tags = mesh.meshtags(domain, fdim, facet_indices[sorted_facets], facet_markers[sorted_facets])
Print out the unique facet index numbers
top_imap = domain.topology.index_map(2) # index map of 2D entities in domain (facets)
values = np.zeros(top_imap.size_global) # an array of zeros of the same size as number of 2D entities
values[facet_tags.indices]=facet_tags.values # populating the array with facet tag index numbers
print(np.unique(facet_tags.values)) # printing the unique indices
# Surface numbering:
# boundaries = [(1,xBot),(2,xTop),(3,yBot),(4,yTop),(5,zBot),(6,zTop)]
[1 2 3 4 5 6]
Visualize reference configuration and boundary facets
import pyvista
pyvista.set_jupyter_backend('html')
from dolfinx.plot import vtk_mesh
pyvista.start_xvfb()
# initialize a plotter
plotter = pyvista.Plotter()
# Add the mesh.
topology, cell_types, geometry = plot.vtk_mesh(domain, domain.topology.dim)
grid = pyvista.UnstructuredGrid(topology, cell_types, geometry)
plotter.add_mesh(grid, show_edges=True)#, opacity=0.25)
# Add colored 2D surfaces for the named surfaces
xBot_surf = pyvista.UnstructuredGrid(*vtk_mesh(domain, domain.topology.dim-1,facet_tags.indices[facet_tags.values==1]) )
yBot_surf = pyvista.UnstructuredGrid(*vtk_mesh(domain, domain.topology.dim-1,facet_tags.indices[facet_tags.values==3]) )
zBot_surf = pyvista.UnstructuredGrid(*vtk_mesh(domain, domain.topology.dim-1,facet_tags.indices[facet_tags.values==5]) )
#
actor = plotter.add_mesh(xBot_surf, show_edges=True,color="yellow") # xBot face is blue
actor2 = plotter.add_mesh(yBot_surf, show_edges=True,color="red") # yBot is red
actor3 = plotter.add_mesh(zBot_surf, show_edges=True,color="blue") # zBot is green
labels = dict(xlabel='X', ylabel='Y',zlabel='Z')
plotter.add_axes(**labels)
plotter.screenshot("results/plate_mesh.png")
from IPython.display import Image
Image(filename='results/plate_mesh.png')
# #Use the following commands for a zoom-able view
# if not pyvista.OFF_SCREEN:
# plotter.show()
# else:
# plotter.screenshot("mesh.png")
Define boundary and volume integration measure#
# Define the boundary integration measure "ds" using the facet tags,
# also specify the number of surface quadrature points.
ds = ufl.Measure('ds', domain=domain, subdomain_data=facet_tags, metadata={'quadrature_degree':2})
# Define the volume integration measure "dx"
# also specify the number of volume quadrature points.
dx = ufl.Measure('dx', domain=domain, metadata={'quadrature_degree': 2})
# Define facet normal
# n = ufl.FacetNormal(domain)
n = ufl.FacetNormal(domain)
Material parameters#
k_B = Constant(domain,PETSc.ScalarType(1.38E-17)) # Boltzmann's constant
theta0 = Constant(domain,PETSc.ScalarType(273)) # Initial temperature
Gshear_0 = Constant(domain,PETSc.ScalarType(280)) # Ground sate shear modulus
N_R = Constant(domain,PETSc.ScalarType(Gshear_0/(k_B*theta0)))# Number polymer chains per unit ref. volume
lambdaL = Constant(domain,PETSc.ScalarType(5.12)) # Locking stretch
Kbulk = Constant(domain,PETSc.ScalarType(1000*Gshear_0)) # Bulk modulus
alpha = Constant(domain,PETSc.ScalarType(180.0E-6)) # Coefficient of thermal expansion
c_v = Constant(domain,PETSc.ScalarType(1839)) # Specific heat
k_therm = Constant(domain,PETSc.ScalarType(0.16E3)) # Thermal conductivity
Function spaces#
# Define function space, both vectorial and scalar
#
U2 = element("Lagrange", domain.basix_cell(), 2, shape=(3,)) # For displacement
P1 = element("Lagrange", domain.basix_cell(), 1) # For pressure and temperature
#
TH = mixed_element([U2, P1, P1]) # Taylor-Hood style mixed element
ME = functionspace(domain, TH) # Total space for all DOFs
# Define actual functions with the required DOFs
w = Function(ME)
u, p, theta = split(w) # displacement u, pressure p, temperature theta
# A copy of functions to store values in the previous step for time-stepping
w_old = Function(ME)
u_old, p_old, theta_old = split(w_old)
# Define test functions
u_test, p_test, theta_test = TestFunctions(ME)
# Define trial functions needed for automatic differentiation
dw = TrialFunction(ME)
Initial conditions#
The initial conditions for \(\mathbf{u}\) and \(p\) are zero everywhere.
These are imposed automatically, since we have not specified any non-zero initial conditions.
We do, however, need to impose the uniform initial condition for temperature \(\vartheta = \vartheta_0\). This is done below.
# Assign initial temperature theta0 to the whole domain
w.sub(2).interpolate(lambda x: np.full((x.shape[1],), theta0))
w_old.sub(2).interpolate(lambda x: np.full((x.shape[1],), theta0))
Subroutines for kinematics and constitutive equations#
# Deformation gradient
def F_calc(u):
Id = Identity(3)
F = Id + grad(u)
return F
def lambdaBar_calc(u):
F = F_calc(u)
C = F.T*F
Cdis = J**(-2/3)*C
I1 = tr(Cdis)
lambdaBar = sqrt(I1/3.0)
return lambdaBar
def zeta_calc(u):
lambdaBar = lambdaBar_calc(u)
# Use Pade approximation of Langevin inverse
z = lambdaBar/lambdaL
z = conditional(gt(z,0.95), 0.95, z) # Keep simulation from blowing up
beta = z*(3.0 - z**2.0)/(1.0 - z**2.0)
zeta = (lambdaL/(3*lambdaBar))*beta
return zeta
#----------------------------------------------
# Subroutine for calculating the Piola stress
#----------------------------------------------
def Piola_calc(u, p, theta):
F = F_calc(u)
J = det(F)
C = F.T*F
#
zeta = zeta_calc(u)
Gshear = N_R * k_B * theta * zeta
#
Piola = J**(-2/3) * Gshear * (F - (1/3)*tr(C)*inv(F.T) ) - J * p * inv(F.T)
return Piola
#--------------------------------------------------------------
# Subroutine for calculating the stress temperature tensor
#--------------------------------------------------------------
def M_calc(u):
Id = Identity(3)
F = F_calc(u)
#
C = F.T*F
Cinv = inv(C)
J = det(F)
zeta = zeta_calc(u)
#
fac1 = N_R * k_B * zeta
fac2 = (3*Kbulk*alpha)/J
#
M = J**(-2/3) * fac1 * (Id - (1/3)*tr(C)*Cinv) - J * fac2 * Cinv
return M
#--------------------------------------------------------------
# Subroutine for calculating the heat flux
#--------------------------------------------------------------
# Heat flux
def Heat_flux_calc(u, theta):
F = F_calc(u)
J = det(F)
#
Cinv = inv(F.T*F)
#
Tcond = J * k_therm * Cinv # Thermal conductivity tensor
#
Qmat = - Tcond * grad(theta)
return Qmat
#--------------------------------------------------------------------------------
# Subroutine for calculating the principal Cauchy stress for visualization if needed
#--------------------------------------------------------------------------------
def tensor_eigs(T):
# invariants of T
I1 = tr(T)
I2 = (1/2)*(tr(T)**2 - tr(T*T))
I3 = det(T)
# Intermediate quantities b, c, d
b = -I1
c = I2
d = -I3
# intermediate quantities E, F, G
E = (3*c - b*b)/3
F = (2*(b**3) - 9*b*c + 27*d)/27
G = (F**2)/4 + (E**3)/27
# Intermediate quantities H, I, J, K, L
H = sqrt(-(E**3)/27)
I = H**(1/3)
J = acos(-F/(2*H))
K = cos(J/3)
L = sqrt(3)*sin(J/3)
# Finally, the (not necessarily ordered) eigenvalues
t1 = 2*I*K - b/3
t2 = -I*(K+L) - b/3
t3 = -I*(K-L) - b/3
# Order the eigenvalues using conditionals
#
T1_temp = conditional(lt(t1, t3), t3, t1 ) # returns the larger of t1 and t3.
T1 = conditional(lt(T1_temp, t2), t2, T1_temp ) # returns the larger of T1_temp and t2.
#
T3_temp = conditional(gt(t3, t1), t1, t3 ) # returns the smaller of t1 and t3.
T3 = conditional(gt(T3_temp, t2), t2, T1_temp ) # returns the smaller of T3_temp and t2.
#
# use the trace to report the middle eigenvalue.
T2 = I1 - T1 - T3
return T1, T2, T3
Evaluate kinematics and constitutive relations#
# Kinematics
F = F_calc(u)
J = det(F)
#
lambdaBar = lambdaBar_calc(u)
#
F_old = F_calc(u_old)
J_old = det(F_old)
#
C = F.T*F
C_old = F_old.T*F_old
# Piola stress
Piola = Piola_calc(u, p, theta)
# Calculate the stress-temperature tensor
M = M_calc(u)
# Calculate the heat flux
Qmat = Heat_flux_calc(u,theta)
Weak forms#
# Residuals:
# Res_0: Balance of forces (test fxn: u)
# Res_1: Coupling pressure (test fxn: p)
# Res_2: Balance of energy (test fxn: theta)
# boundaries = [(1,xBot),(2,xTop),(3,yBot),(4,yTop),(5,zBot),(6,zTop)]
# Time step constant within domain
dk = Constant(domain, PETSc.ScalarType(dt))
# Create a constant for the value of the pressure
press_cons = Constant(domain,PETSc.ScalarType(pressRamp(0)))
# Cofactor of F
Fcof = J*inv(F.T)
# Configuration-dependent traction
traction = - press_cons * dot(Fcof,n)
# The weak form for the equilibrium equation
Res_0 = inner(Piola , grad(u_test) )*dx - dot(traction, u_test)*ds(6)
# The weak form for the pressure
fac_p = ( ln(J) - 3*alpha*(theta-theta0) )/J
#
Res_1 = dot( (p/Kbulk + fac_p), p_test)*dx
# The weak form for heat equation
Res_2 = dot( c_v*(theta - theta_old), theta_test)*dx \
- (1/2)*theta * inner(M, (C - C_old)) * theta_test*dx \
- dk* dot(Qmat , grad(theta_test) )*dx
# Total weak form
Res = Res_0 + Res_1 + Res_2
# Automatic differentiation tangent:
a = derivative(Res, w, dw)
Set-up output files#
# results file name
results_name = "3D_thermoelas_solar_sail"
# Function space for projection of results
U1 = element("DG", domain.basix_cell(), 1, shape=(3,)) # For displacement
P0 = element("DG", domain.basix_cell(), 1) # For pressure and temperature
T1 = element("DG", domain.basix_cell(), 1, shape=(3,3))# For stress tensor
V1 = fem.functionspace(domain, P0) # Scalar function space
V2 = fem.functionspace(domain, U1) # Vector function space
V3 = fem.functionspace(domain, T1) # Tensor function space
# fields to write to output file
u_vis = Function(V2)
u_vis.name = "disp"
p_vis = Function(V1)
p_vis.name = "p"
theta_vis = Function(V1)
theta_vis.name = "theta"
J_vis = Function(V1)
J_vis.name = "J"
J_expr = Expression(J,V1.element.interpolation_points())
lambdaBar_vis = Function(V1)
lambdaBar_vis.name = "lambdaBar"
lambdaBar_expr = Expression(lambdaBar,V1.element.interpolation_points())
P11 = Function(V1)
P11.name = "P11"
P11_expr = Expression(Piola[0,0],V1.element.interpolation_points())
#
P22 = Function(V1)
P22.name = "P22"
P22_expr = Expression(Piola[1,1],V1.element.interpolation_points())
#
P33 = Function(V1)
P33.name = "P33"
P33_expr = Expression(Piola[2,2],V1.element.interpolation_points())
# Mises stress
T = Piola*F.T/J
T0 = T - (1/3)*tr(T)*Identity(3)
Mises = sqrt((3/2)*inner(T0, T0))
Mises_vis= Function(V1,name="Mises")
Mises_expr = Expression(Mises,V1.element.interpolation_points())
# set up the output VTX files.
file_results = VTXWriter(
MPI.COMM_WORLD,
"results/" + results_name + ".bp",
[ # put the functions here you wish to write to output
u_vis, p_vis, theta_vis, J_vis, P11, P22, P33,
lambdaBar_vis,Mises_vis,
],
engine="BP4",
)
def writeResults(t):
# Output field interpolation
u_vis.interpolate(w.sub(0))
p_vis.interpolate(w.sub(1))
theta_vis.interpolate(w.sub(2))
J_vis.interpolate(J_expr)
P11.interpolate(P11_expr)
P22.interpolate(P22_expr)
P33.interpolate(P33_expr)
lambdaBar_vis.interpolate(lambdaBar_expr)
Mises_vis.interpolate(Mises_expr)
# Write output fields
file_results.write(t)
Infrastructure for pulling out time history data (force, displacement, etc.)#
# Identify point A
pointForDisp_A = np.array([70, 60,0.0])
bb_tree = dolfinx.geometry.bb_tree(domain,domain.topology.dim)
cell_candidates = dolfinx.geometry.compute_collisions_points(bb_tree, pointForDisp_A)
colliding_cells_A = dolfinx.geometry.compute_colliding_cells(domain, cell_candidates, pointForDisp_A).array
# Identify point B
pointForDisp_B = np.array([L0, 0.0,0.0])
bb_tree = dolfinx.geometry.bb_tree(domain,domain.topology.dim)
cell_candidates = dolfinx.geometry.compute_collisions_points(bb_tree, pointForDisp_B)
colliding_cells_B = dolfinx.geometry.compute_colliding_cells(domain, cell_candidates, pointForDisp_B).array
Analysis Step#
# Give the step a descriptive name
step = "Press/temp loading"
Boundary conditions#
# Zero displacement boundary conditions for the two fixed points
#
V0, submap = ME.sub(0).collapse()
#
fixed1_u_dofs = fem.locate_dofs_geometrical((ME.sub(0), V0), pin1)
fixed1_disp = Function(V0)
fixed1_disp.interpolate(lambda x: np.stack(( np.zeros(x.shape[1]), np.zeros(x.shape[1]), np.zeros(x.shape[1]) ) ) )
#
fixed2_u_dofs = fem.locate_dofs_geometrical((ME.sub(0), V0), pin2)
fixed2_disp = Function(V0)
fixed2_disp.interpolate(lambda x: np.stack(( np.zeros(x.shape[1]), np.zeros(x.shape[1]), np.zeros(x.shape[1]) ) ) )
#
bcs_1 = dirichletbc(fixed1_disp, fixed1_u_dofs, ME.sub(0)) # u fix - left corner node pin1
#
bcs_2 = dirichletbc(fixed2_disp, fixed2_u_dofs, ME.sub(0)) # u fix - right corner node pin2
# Recall the sub-domains names and numbers
# boundaries = [(1,xBot),(2,xTop),(3,yBot),(4,yTop),(5,zBot),(6,zTop)]
# Find the specific DOFs which will be constrained.
xBot_u1_dofs = fem.locate_dofs_topological(ME.sub(0).sub(0), facet_tags.dim, facet_tags.find(1))
#xTop_u1_dofs = fem.locate_dofs_topological(ME.sub(0).sub(0), facet_tags.dim, facet_tags.find(2))
yBot_u2_dofs = fem.locate_dofs_topological(ME.sub(0).sub(1), facet_tags.dim, facet_tags.find(3))
#yTop_u2_dofs = fem.locate_dofs_topological(ME.sub(0).sub(1), facet_tags.dim, facet_tags.find(4))
#zBot_u3_dofs = fem.locate_dofs_topological(ME.sub(0).sub(2), facet_tags.dim, facet_tags.find(5))
#zTop_u3_dofs = fem.locate_dofs_topological(ME.sub(0).sub(2), facet_tags.dim, facet_tags.find(6))
#xBot_theta_dofs = fem.locate_dofs_topological(ME.sub(2), facet_tags.dim, facet_tags.find(1))
xTop_theta_dofs = fem.locate_dofs_topological(ME.sub(2), facet_tags.dim, facet_tags.find(2))
#yBot_theta_dofs = fem.locate_dofs_topological(ME.sub(2), facet_tags.dim, facet_tags.find(3))
yTop_theta_dofs = fem.locate_dofs_topological(ME.sub(2), facet_tags.dim, facet_tags.find(4))
zBot_theta_dofs = fem.locate_dofs_topological(ME.sub(2), facet_tags.dim, facet_tags.find(5))
zTop_theta_dofs = fem.locate_dofs_topological(ME.sub(2), facet_tags.dim, facet_tags.find(6))
# Constant for applied temperature
theta_cons = Constant(domain,PETSc.ScalarType(thetaRamp(0)))
# Dirichlet BCs for displacement
bcs_3 = dirichletbc(0.0, xBot_u1_dofs, ME.sub(0).sub(0)) # u1 fix - xBot
bcs_4 = dirichletbc(0.0, yBot_u2_dofs, ME.sub(0).sub(1)) # u2 fix - yBot
#
# Dirichlet BCs for temperature
bcs_5 = dirichletbc(theta_cons, zBot_theta_dofs, ME.sub(2)) # Theta prescribe - zBot
bcs_6 = dirichletbc(theta_cons, zTop_theta_dofs, ME.sub(2)) # Theta prescribe - zTop
bcs_7 = dirichletbc(theta_cons, xTop_theta_dofs, ME.sub(2)) # Theta prescribe - xTop
bcs_8 = dirichletbc(theta_cons, yTop_theta_dofs, ME.sub(2)) # Theta prescribe - yTop
# Complete set of Dirichlet bcs
bcs = [bcs_1, bcs_2, bcs_3, bcs_4, bcs_5, bcs_6, bcs_7, bcs_8]
Define the nonlinear variational problem#
# Set up nonlinear problem
problem = NonlinearProblem(Res, w, bcs, a)
# The global newton solver and params
solver = NewtonSolver(MPI.COMM_WORLD, problem)
solver.convergence_criterion = "incremental"
solver.rtol = 1e-8
solver.atol = 1e-8
solver.max_it = 50
solver.report = True
# The Krylov solver parameters.
ksp = solver.krylov_solver
opts = PETSc.Options()
option_prefix = ksp.getOptionsPrefix()
opts[f"{option_prefix}ksp_type"] = "preonly" # "preonly" works equally well
opts[f"{option_prefix}pc_type"] = "lu" # do not use 'gamg' pre-conditioner
opts[f"{option_prefix}pc_factor_mat_solver_type"] = "mumps"
opts[f"{option_prefix}ksp_max_it"] = 30
ksp.setFromOptions()
Initialize arrays for storing output history#
# Arrays for storing output history
totSteps = 100000
timeHist0 = np.zeros(shape=[totSteps])
timeHist1 = np.zeros(shape=[totSteps])
timeHist2 = np.zeros(shape=[totSteps])
# timeHist3 = np.zeros(shape=[totSteps])
# timeHist4 = np.zeros(shape=[totSteps])
#
# timeHist3[0] = theta0 # Initialize the temperature
# timeHist4[0] = theta0 # Initialize the temperature
# Initialize a counter for reporting data
ii=0
# Write initial state to file
writeResults(t=0.0)
Start calculation loop#
# Print message for simulation start
print("------------------------------------")
print("Simulation Start")
print("------------------------------------")
# Store start time
startTime = datetime.now()
# Time-stepping solution procedure loop
while (round(t + dt, 9) <= Ttot):
# increment time
t += dt
# increment counter
ii += 1
# update time variables in time-dependent BCs
theta_cons.value = float(thetaRamp(t))
press_cons.value = float(pressRamp(t))
# Solve the problem
try:
(iter, converged) = solver.solve(w)
except: # Break the loop if solver fails
print("Ended Early")
break
# Collect results from MPI ghost processes
w.x.scatter_forward()
# Write output to file
writeResults(t)
# Update DOFs for next step
w_old.x.array[:] = w.x.array
# Store output history at a particular point at current time
#
timeHist0[ii] = t # time
#
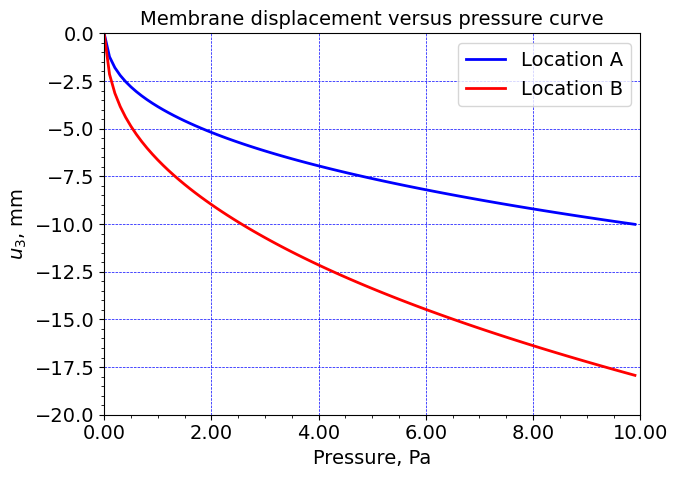
timeHist1[ii] = w.sub(0).sub(2).eval([70,60,0.0],colliding_cells_A[0])[0] # u_3 displacement location A
#
timeHist2[ii] = w.sub(0).sub(2).eval([L0,0.0,0.0],colliding_cells_B[0])[0] # u_3 displacement location B
# Print progress of calculation
if ii%1 == 0:
now = datetime.now()
current_time = now.strftime("%H:%M:%S")
print("Step: {} | Increment: {}, Iterations: {}".\
format(step, ii, iter))
print(" Simulation Time: {} s of {} s".\
format(round(t,4), Ttot))
print()
------------------------------------
Simulation Start
------------------------------------
Step: Press/temp loading | Increment: 1, Iterations: 7
Simulation Time: 1.0 s of 100 s
Step: Press/temp loading | Increment: 2, Iterations: 5
Simulation Time: 2.0 s of 100 s
Step: Press/temp loading | Increment: 3, Iterations: 5
Simulation Time: 3.0 s of 100 s
Step: Press/temp loading | Increment: 4, Iterations: 5
Simulation Time: 4.0 s of 100 s
Step: Press/temp loading | Increment: 5, Iterations: 5
Simulation Time: 5.0 s of 100 s
Step: Press/temp loading | Increment: 6, Iterations: 4
Simulation Time: 6.0 s of 100 s
Step: Press/temp loading | Increment: 7, Iterations: 4
Simulation Time: 7.0 s of 100 s
Step: Press/temp loading | Increment: 8, Iterations: 4
Simulation Time: 8.0 s of 100 s
Step: Press/temp loading | Increment: 9, Iterations: 4
Simulation Time: 9.0 s of 100 s
Step: Press/temp loading | Increment: 10, Iterations: 4
Simulation Time: 10.0 s of 100 s
Step: Press/temp loading | Increment: 11, Iterations: 4
Simulation Time: 11.0 s of 100 s
Step: Press/temp loading | Increment: 12, Iterations: 4
Simulation Time: 12.0 s of 100 s
Step: Press/temp loading | Increment: 13, Iterations: 4
Simulation Time: 13.0 s of 100 s
Step: Press/temp loading | Increment: 14, Iterations: 4
Simulation Time: 14.0 s of 100 s
Step: Press/temp loading | Increment: 15, Iterations: 4
Simulation Time: 15.0 s of 100 s
Step: Press/temp loading | Increment: 16, Iterations: 4
Simulation Time: 16.0 s of 100 s
Step: Press/temp loading | Increment: 17, Iterations: 4
Simulation Time: 17.0 s of 100 s
Step: Press/temp loading | Increment: 18, Iterations: 4
Simulation Time: 18.0 s of 100 s
Step: Press/temp loading | Increment: 19, Iterations: 4
Simulation Time: 19.0 s of 100 s
Step: Press/temp loading | Increment: 20, Iterations: 4
Simulation Time: 20.0 s of 100 s
Step: Press/temp loading | Increment: 21, Iterations: 4
Simulation Time: 21.0 s of 100 s
Step: Press/temp loading | Increment: 22, Iterations: 4
Simulation Time: 22.0 s of 100 s
Step: Press/temp loading | Increment: 23, Iterations: 4
Simulation Time: 23.0 s of 100 s
Step: Press/temp loading | Increment: 24, Iterations: 4
Simulation Time: 24.0 s of 100 s
Step: Press/temp loading | Increment: 25, Iterations: 4
Simulation Time: 25.0 s of 100 s
Step: Press/temp loading | Increment: 26, Iterations: 4
Simulation Time: 26.0 s of 100 s
Step: Press/temp loading | Increment: 27, Iterations: 4
Simulation Time: 27.0 s of 100 s
Step: Press/temp loading | Increment: 28, Iterations: 4
Simulation Time: 28.0 s of 100 s
Step: Press/temp loading | Increment: 29, Iterations: 4
Simulation Time: 29.0 s of 100 s
Step: Press/temp loading | Increment: 30, Iterations: 4
Simulation Time: 30.0 s of 100 s
Step: Press/temp loading | Increment: 31, Iterations: 4
Simulation Time: 31.0 s of 100 s
Step: Press/temp loading | Increment: 32, Iterations: 4
Simulation Time: 32.0 s of 100 s
Step: Press/temp loading | Increment: 33, Iterations: 4
Simulation Time: 33.0 s of 100 s
Step: Press/temp loading | Increment: 34, Iterations: 4
Simulation Time: 34.0 s of 100 s
Step: Press/temp loading | Increment: 35, Iterations: 4
Simulation Time: 35.0 s of 100 s
Step: Press/temp loading | Increment: 36, Iterations: 4
Simulation Time: 36.0 s of 100 s
Step: Press/temp loading | Increment: 37, Iterations: 4
Simulation Time: 37.0 s of 100 s
Step: Press/temp loading | Increment: 38, Iterations: 4
Simulation Time: 38.0 s of 100 s
Step: Press/temp loading | Increment: 39, Iterations: 4
Simulation Time: 39.0 s of 100 s
Step: Press/temp loading | Increment: 40, Iterations: 4
Simulation Time: 40.0 s of 100 s
Step: Press/temp loading | Increment: 41, Iterations: 4
Simulation Time: 41.0 s of 100 s
Step: Press/temp loading | Increment: 42, Iterations: 4
Simulation Time: 42.0 s of 100 s
Step: Press/temp loading | Increment: 43, Iterations: 4
Simulation Time: 43.0 s of 100 s
Step: Press/temp loading | Increment: 44, Iterations: 4
Simulation Time: 44.0 s of 100 s
Step: Press/temp loading | Increment: 45, Iterations: 4
Simulation Time: 45.0 s of 100 s
Step: Press/temp loading | Increment: 46, Iterations: 4
Simulation Time: 46.0 s of 100 s
Step: Press/temp loading | Increment: 47, Iterations: 4
Simulation Time: 47.0 s of 100 s
Step: Press/temp loading | Increment: 48, Iterations: 4
Simulation Time: 48.0 s of 100 s
Step: Press/temp loading | Increment: 49, Iterations: 4
Simulation Time: 49.0 s of 100 s
Step: Press/temp loading | Increment: 50, Iterations: 4
Simulation Time: 50.0 s of 100 s
Step: Press/temp loading | Increment: 51, Iterations: 4
Simulation Time: 51.0 s of 100 s
Step: Press/temp loading | Increment: 52, Iterations: 4
Simulation Time: 52.0 s of 100 s
Step: Press/temp loading | Increment: 53, Iterations: 4
Simulation Time: 53.0 s of 100 s
Step: Press/temp loading | Increment: 54, Iterations: 4
Simulation Time: 54.0 s of 100 s
Step: Press/temp loading | Increment: 55, Iterations: 4
Simulation Time: 55.0 s of 100 s
Step: Press/temp loading | Increment: 56, Iterations: 4
Simulation Time: 56.0 s of 100 s
Step: Press/temp loading | Increment: 57, Iterations: 4
Simulation Time: 57.0 s of 100 s
Step: Press/temp loading | Increment: 58, Iterations: 4
Simulation Time: 58.0 s of 100 s
Step: Press/temp loading | Increment: 59, Iterations: 4
Simulation Time: 59.0 s of 100 s
Step: Press/temp loading | Increment: 60, Iterations: 4
Simulation Time: 60.0 s of 100 s
Step: Press/temp loading | Increment: 61, Iterations: 4
Simulation Time: 61.0 s of 100 s
Step: Press/temp loading | Increment: 62, Iterations: 4
Simulation Time: 62.0 s of 100 s
Step: Press/temp loading | Increment: 63, Iterations: 4
Simulation Time: 63.0 s of 100 s
Step: Press/temp loading | Increment: 64, Iterations: 4
Simulation Time: 64.0 s of 100 s
Step: Press/temp loading | Increment: 65, Iterations: 4
Simulation Time: 65.0 s of 100 s
Step: Press/temp loading | Increment: 66, Iterations: 4
Simulation Time: 66.0 s of 100 s
Step: Press/temp loading | Increment: 67, Iterations: 4
Simulation Time: 67.0 s of 100 s
Step: Press/temp loading | Increment: 68, Iterations: 4
Simulation Time: 68.0 s of 100 s
Step: Press/temp loading | Increment: 69, Iterations: 4
Simulation Time: 69.0 s of 100 s
Step: Press/temp loading | Increment: 70, Iterations: 4
Simulation Time: 70.0 s of 100 s
Step: Press/temp loading | Increment: 71, Iterations: 4
Simulation Time: 71.0 s of 100 s
Step: Press/temp loading | Increment: 72, Iterations: 4
Simulation Time: 72.0 s of 100 s
Step: Press/temp loading | Increment: 73, Iterations: 4
Simulation Time: 73.0 s of 100 s
Step: Press/temp loading | Increment: 74, Iterations: 4
Simulation Time: 74.0 s of 100 s
Step: Press/temp loading | Increment: 75, Iterations: 4
Simulation Time: 75.0 s of 100 s
Step: Press/temp loading | Increment: 76, Iterations: 4
Simulation Time: 76.0 s of 100 s
Step: Press/temp loading | Increment: 77, Iterations: 4
Simulation Time: 77.0 s of 100 s
Step: Press/temp loading | Increment: 78, Iterations: 4
Simulation Time: 78.0 s of 100 s
Step: Press/temp loading | Increment: 79, Iterations: 4
Simulation Time: 79.0 s of 100 s
Step: Press/temp loading | Increment: 80, Iterations: 4
Simulation Time: 80.0 s of 100 s
Step: Press/temp loading | Increment: 81, Iterations: 4
Simulation Time: 81.0 s of 100 s
Step: Press/temp loading | Increment: 82, Iterations: 4
Simulation Time: 82.0 s of 100 s
Step: Press/temp loading | Increment: 83, Iterations: 4
Simulation Time: 83.0 s of 100 s
Step: Press/temp loading | Increment: 84, Iterations: 4
Simulation Time: 84.0 s of 100 s
Step: Press/temp loading | Increment: 85, Iterations: 4
Simulation Time: 85.0 s of 100 s
Step: Press/temp loading | Increment: 86, Iterations: 4
Simulation Time: 86.0 s of 100 s
Step: Press/temp loading | Increment: 87, Iterations: 4
Simulation Time: 87.0 s of 100 s
Step: Press/temp loading | Increment: 88, Iterations: 4
Simulation Time: 88.0 s of 100 s
Step: Press/temp loading | Increment: 89, Iterations: 4
Simulation Time: 89.0 s of 100 s
Step: Press/temp loading | Increment: 90, Iterations: 4
Simulation Time: 90.0 s of 100 s
Step: Press/temp loading | Increment: 91, Iterations: 4
Simulation Time: 91.0 s of 100 s
Step: Press/temp loading | Increment: 92, Iterations: 4
Simulation Time: 92.0 s of 100 s
Step: Press/temp loading | Increment: 93, Iterations: 4
Simulation Time: 93.0 s of 100 s
Step: Press/temp loading | Increment: 94, Iterations: 4
Simulation Time: 94.0 s of 100 s
Step: Press/temp loading | Increment: 95, Iterations: 4
Simulation Time: 95.0 s of 100 s
Step: Press/temp loading | Increment: 96, Iterations: 4
Simulation Time: 96.0 s of 100 s
Step: Press/temp loading | Increment: 97, Iterations: 4
Simulation Time: 97.0 s of 100 s
Step: Press/temp loading | Increment: 98, Iterations: 4
Simulation Time: 98.0 s of 100 s
Step: Press/temp loading | Increment: 99, Iterations: 4
Simulation Time: 99.0 s of 100 s
Step: Press/temp loading | Increment: 100, Iterations: 4
Simulation Time: 100.0 s of 100 s
Plot results#
# Set up font size, initialize colors array
font = {'size' : 14}
plt.rc('font', **font)
#
prop_cycle = plt.rcParams['axes.prop_cycle']
colors = prop_cycle.by_key()['color']
# Only plot as far as we have time history data
ind = np.argmax(timeHist0[:])
# Create figure for surface temperature versus time curve.
#
fig = plt.figure()
ax=fig.gca()
#---------------------------------------------------------------------------------------------
plt.plot( (10E-3*timeHist0[0:ind]/Ttot)*1000, timeHist1[0:ind], c='b', linewidth=2.0, label='Location A')
plt.plot( (10E-3*timeHist0[0:ind]/Ttot)*1000, timeHist2[0:ind], c='r', linewidth=2.0, label='Location B')
#---------------------------------------------------------------------------------------------
plt.xlim(0,10)
plt.ylim(-20,0)
plt.grid(linestyle="--", linewidth=0.5, color='b')
ax.set_xlabel(r"Pressure, Pa",size=14)
ax.set_ylabel(r"$u_3$, mm",size=14)
ax.set_title(r"Membrane displacement versus pressure curve", size=14, weight='normal')
#
from matplotlib.ticker import AutoMinorLocator,FormatStrFormatter
ax.xaxis.set_minor_locator(AutoMinorLocator())
ax.yaxis.set_minor_locator(AutoMinorLocator())
#plt.legend()
import matplotlib.ticker as ticker
ax.xaxis.set_major_formatter(ticker.FormatStrFormatter('%0.2f'))
plt.legend()
# Save figure
fig = plt.gcf()
fig.set_size_inches(7,5)
plt.tight_layout()
plt.savefig("results/3D_solar_sail_plotting.png", dpi=600)